EtherCAT汇川伺服与CClink IEFB 三菱PLC的通讯案例
概述
捷米特(北京)科技有限公司产品已广泛应用在工控、电力、环保、水文、能源等行业领域,为客户提供稳定、可靠、易用的工业产品。捷米特拥有核心技术,拥有多项专利和软件,即可以为客户提供标准的捷米特 JM-ECTM-CCLKIE网关产品,可以根据需求定制化开发,满足特殊场合的功能需求。
捷米特JM-ECTM-CCLKIE 网关产品可以通过各种数据接口和工业领域的仪表、PLC、计量设备等产品连接,实时采集这些设备中的运行数据、状态数据等信息,并把采集的数据进行整合、运算等操作后传输到其他设备或者云平台。
在某知名汽车制造工厂拥有一条已经投入运行的生产线,该生产线基于三菱FX5U系列CCLINK IEFB通讯网络协议,控制着多台SV660N汇川伺服马达和其他相关设备。然而,随着生产需求的提升和技术的发展,工厂决定引入速度更快、实时性更高的EtherCAT系统来进一步优化生产线。
解决方案
为了实现从CC-link IEFB到EtherCAT的平稳过渡,工厂决定采用一款therCAT主站转CC-link IEFB从站协议JM-ECTM-CCLKIE网关。这款网关设备能够同时连接EtherCAT从站和CC-link IEFB主站,实现两种协议之间的无缝通信。
具体来说,当CC-link IEFB主站发送指令给协议网关时,网关会将这些指令转换为EtherCAT从站可以理解的格式,并将其发送到相应的汇川伺服马达。同样地,当汇川伺服马达通过EtherCAT发送状态信息时,协议网关会将这些信息转换为CC-link IEFB网络可以理解的格式,并将其发送回主站。
实施过程
采用捷米特网关配置与集成:首先,JM-ECTM-CCLKIE网关设备被配置并集成到现有的生产线中。网关的EtherCAT接口连接到工厂新引入的EtherCAT从站,而CC-link IEFB口则连接到原有的CC-link IEFB主站网络。
在汽车制造工厂项目中,引入这样的协议网关可以实现以下好处:
1.提高生产效率:通过引入速度更快的EtherCAT系统,生产线上的汇川伺服马达可以更快速、更准确地执行指令,从而提高生产效率。
2.降低维护成本:通过使用协议网关,工厂可以避免对原有CC-link IEFB网络进行大规模改造或替换,从而降低维护成本。
3.增强灵活性:协议网关允许工厂在保持对原有设备控制的同时,引入新的EtherCAT设备,从而增强生产线的灵活性和可扩展性总之,通过引入协议网关实现EtherCAT主站与CC-link IEFB从站之间的协议转换,汽车制造工厂项目可以充分利用EtherCAT系统的优势,提高生产效率、降低维护成本,并增强生产线的灵活性和可扩展性。
系统架构
捷米特网关可内嵌多种设备驱动(可选,以所拍商品包含协议为准,并非包含全部协议)采集对应的终端设备数据,并可把采集的数据发送给其他设备或者云平台。系统的连接架构如下:

配置方法
捷米特JM-ECTM-CCLKIE网关IP地址
首先VS软件和JM-ECTM-CCLKIE网关成功连通后才能修改网关IP。
如果是两个网口的设备,电脑需要连接到JM-ECTM-CCLKIE网关上的网口使用网口对JM-ECTM-CCLKIE网关IP进行修改。两个网口的IP地址不能设置在同一个网段。
在VS软件上点击菜单“工具”-“配置网络”,在弹出的对话框中输入新的JM-ECTM-CCLKIE网关IP地址,然后点击“设置”。
修改JM-ECTM-CCLKIE 网关 IP需要VS软件已经和JM-ECTM-CCLKIE网关可以能正常通信的情况下进行。
修改JM-ECTM-CCLKIE网关串口参数
点击工程名称(1),在窗口的右面修改对应的串口参数。修改完成后点击(3)保存。修改采集设备的相关参数
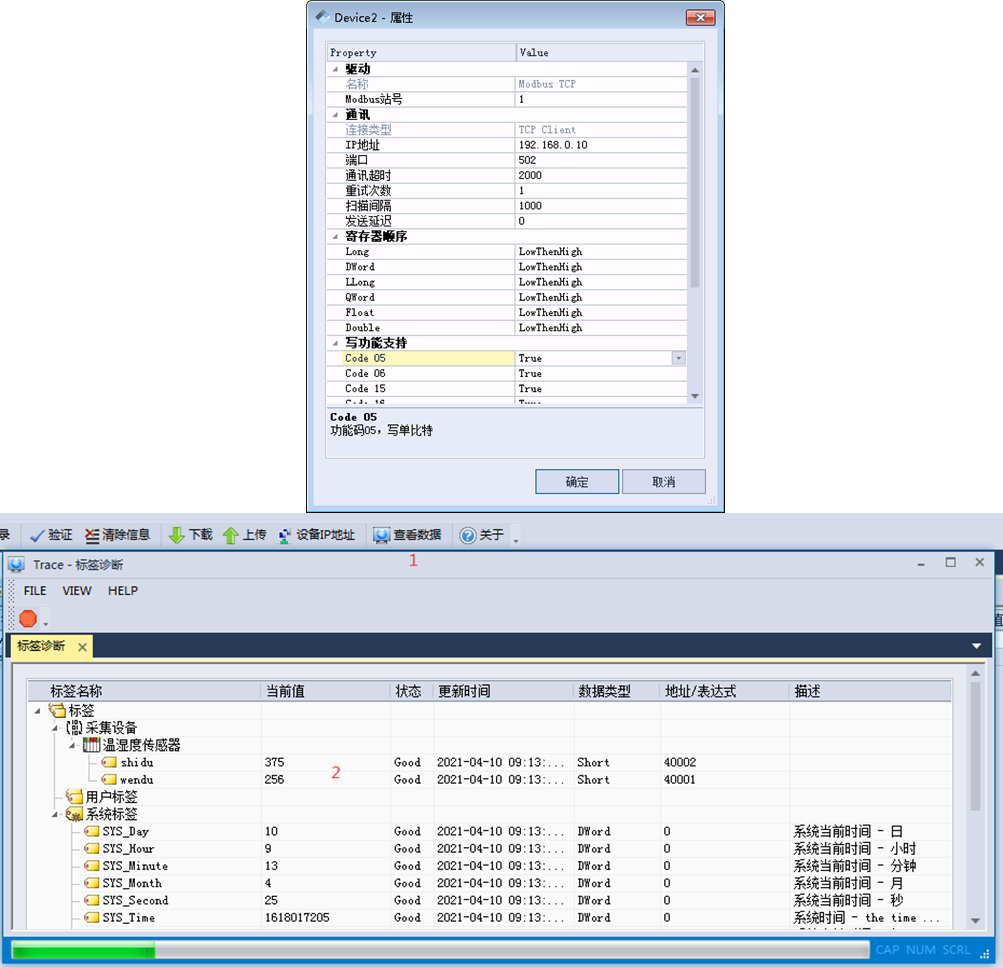
在VS软件上增加完各种采集后,如果采集设备的参数有变化,可以在VS软件上进行修改。点击“采集设备”
(1),在右面的设备名称上双击(2),在弹出的对话框上修改对应的参数。

和设备相关的参数都可以在设备属性上进行修改,如设备地址、IP、端口、采集时间间隔、超时时间、重试次数、浮点数的字节顺序等等。
获取cat设备的点位信息
Cat设备IN口通过网线连接到电脑,关闭电脑上的其他网口
关闭软件
运行C:ProgramFilesStudioRuntimebin>EtherCATSlaveInfo.exe。如果没有获取到设备信息,则重新安装npcap软件。
4.
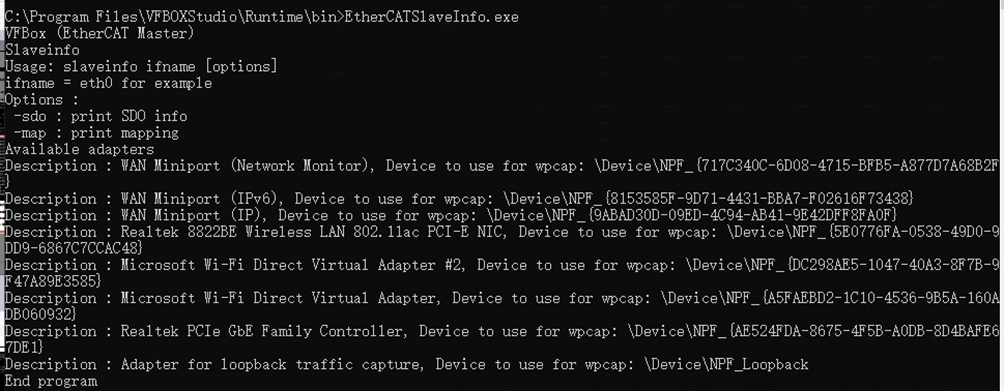
选中和所连接网口对应的device,
C:ProgramFilesBOXStudioRuntimebin>EtherCATSlaveInfo.exe
DeviceNPF_{E8BAD55C-B9A8-439D-9A1F-52A78912EC64}-map
会显示cat设备的map信息。
Slave:1 //设备IDName:VATvacuumvalveOutputsize:184bitsInputsize:200bitsState:4 Delay:0[ns]HasDC:1
DCParentport:0Activeports:1.0.0.0Configuredaddress:1001 Man:00000549ID:02010616Rev:00010001SM0A:1000L:128F:00010036Type:1
SM1A:1080L:128F:00010032Type:2SM2A:1100L:23F:00010074Type:3SM3A:1d00L:25F:00010030Type:4
FMMU0Ls:00000000Ll:23Lsb:0Leb:7Ps:1100Psb:0Ty:02Act:01FMMU1Ls:00000017Ll:25Lsb:0Leb:7Ps:1d00Psb:0Ty:01Act: 01FMMUfunc0:11:22:33:0
MBXlengthwr:128rd:128MBXprotocols:0c CoEdetails:2fFoEdetails:01EoEdetails:00SoEdetails:00Ebuscurrent:0[mA] onlyLRD/LWR:0
PDOmappingaccordingtoCoE:
SM2outputs //outputs是点位类型
addrb index:subbitldata_type name [0x0000.0]0x2300:0x020x20REAL32 TargetPressure
[0x0004.0]0x2200:0x020x20REAL32 TargetPosition//TargetPosition是点位名称,
[0x0004.0]是地址,REAL32是数据类型float
[0x0008.0]0x2401:0x140x20REAL32PressureInputDigitalSensor1[0x000C.0]0x2402:0x140x20REAL32PressureInputDigital Sensor2[0x0010.0]0x2002:0x000x08INTEGER8ControlMode
[0x0011.0]0x2F00:0x060x10UNSIGNED16 GeneralControlSetpoint[0x0013.0]0x2F00:0x070x20REAL32 PressureRampTime
SM3inputs //inputs是点位类型
addrb index:subbitldata_typename
[0x0017.0]0x2300:0x010x20REAL32 ActualPressure[0x001B.0]0x2401:0x180x20REAL32
PressureSensor1[0x001F.0]0x2402:0x180x20REAL32 PressureSensor2 [0x0023.0]0x2200:0x010x20REAL32 ActualPosition//ActualPosition 是点位名称,
[0x0023.0]是地址,设置到网关中是 0x23-0x17=12(网关中填写 10进制)
[0x0027.0]0x2002:0x000x08INTEGER8ControlMode[0x0028.0]0x2030:0x030x10UNSIGNED16 ErrorNumber[0x002A.0]0x2F00:0x0D0x10UNSIGNED16 GeneralStatus[0x002C.0]0x2F00:0x0E0x10UNSIGNED16
GeneralWarnings[0x002E.0]0x2F00:0x0F0x10UNSIGNED16 ExtendedWarnings
Endslaveinfo,closesocketEndprogram
设置网关采集EtherCAT数据
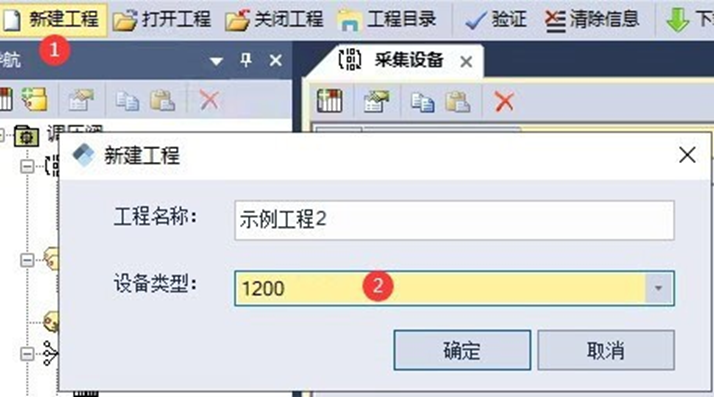
1. 安装软件。打开软件后,点击新建工程。
2.
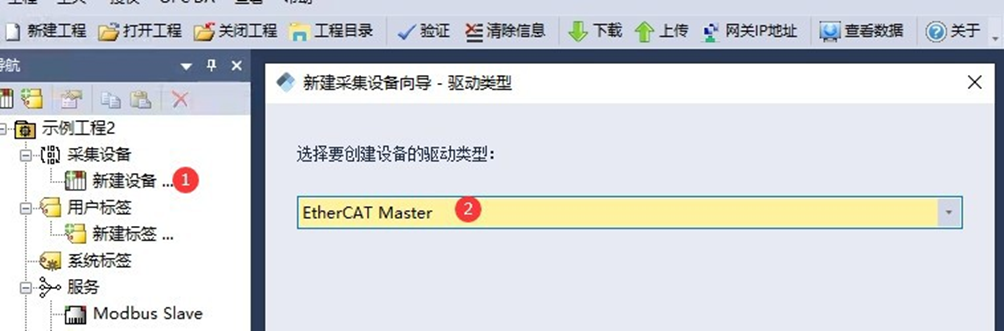
3. 点击“新建设备”,驱动类型选择如下。
4.
5. 输入设备地址:
6.
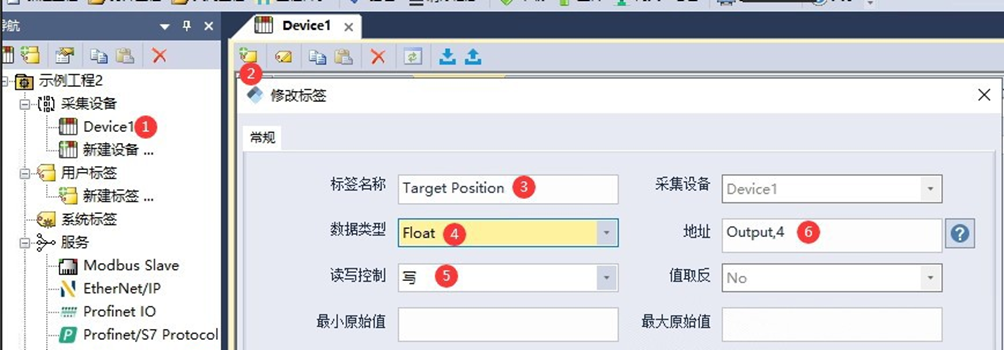
7. 添加TargetPosition标签。写数据给EtherCAT设备
8.
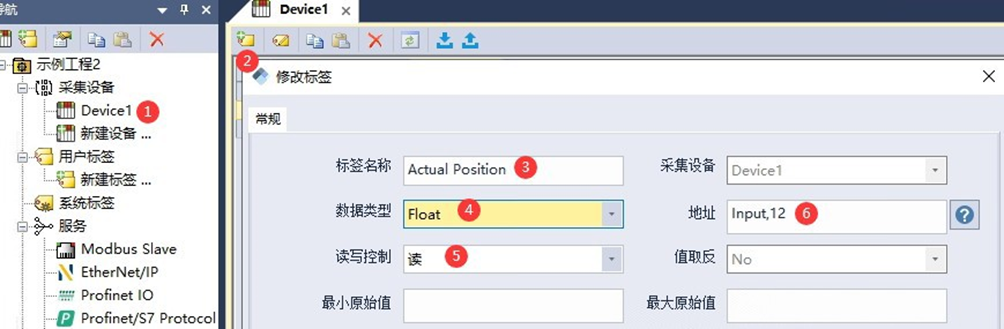
9. 添加ActualPosition标签,读取EtherCAT设备数据。
10.
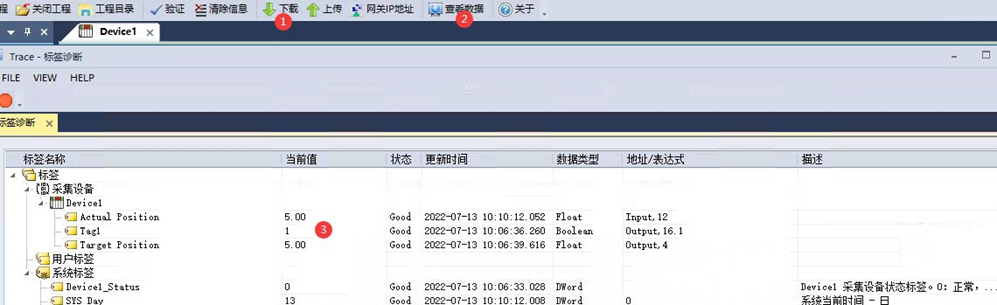
配置完成后点击菜单“下载”,把工程下载到网关里。
点击菜单“查看数据”,查看网关采集到的数据。
转换成CC-link IEFB协议
1,点击菜单,服务-CCLinkIEFieldBasic。启用设置成Yes。
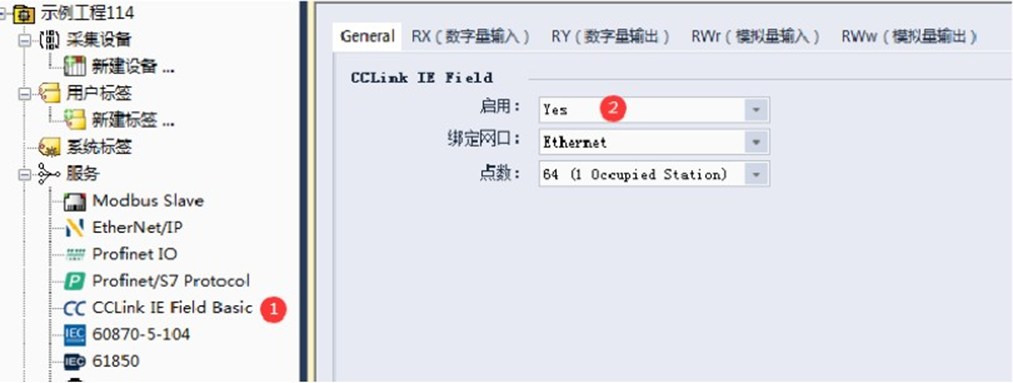
2.把要转换的变量添加到对应的分类中。

3,设置完成后,点击“下载”,把工程下载到网关中。
4,其他设备就可以通过CC-link IEFB协议读取网关的数据。
三菱FX5UPLC 连接网关的CClinkIE 功能
1,网关的网口接到PLC的CCLinkeIE接口,不能接其他接口。
2,电脑上打开“GXWorks2”软件。
3,新建PLC的工程,或者打开已有工程。点击plc参数。

4,依次点击“内置以太网端口设置”-“CC-LinkIEFBasic设置”
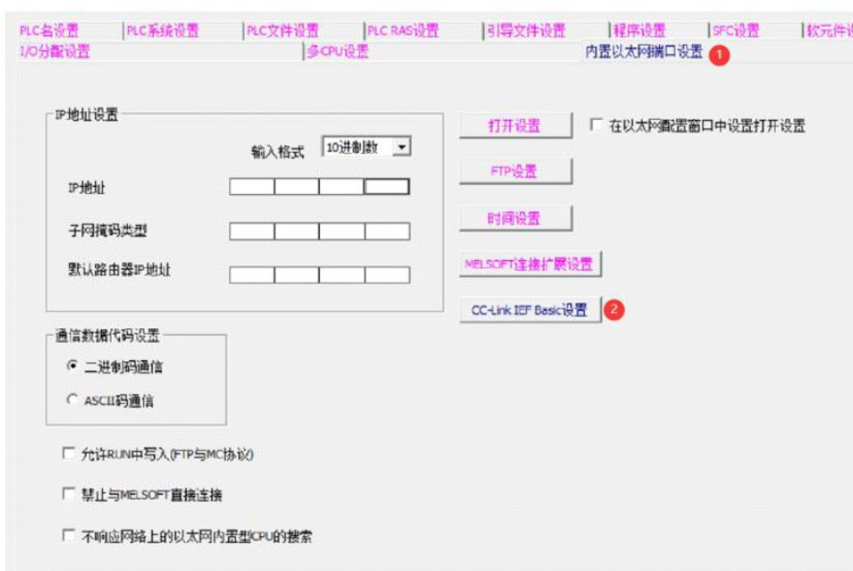
5,依次操作如下1,2,3处的设置,然后点击“网络配置设置”
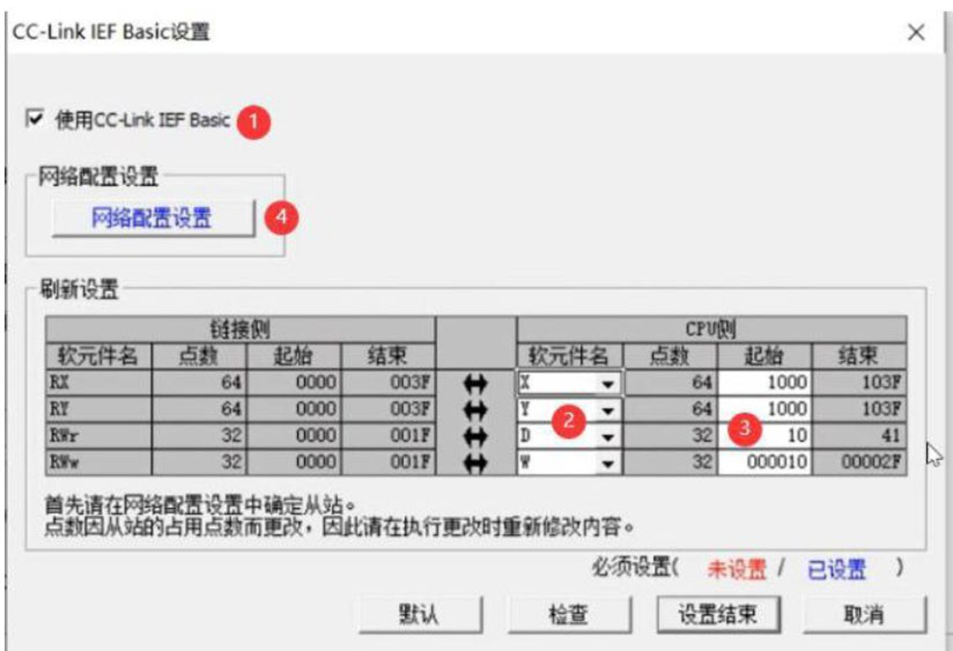
6,点击“连接设备自动检测”就可以获取到网关的信息,如网关的IP地址,起始点的设置。如果没有
7,搜索到网关信息,先检查一下网关和 PLC是否已经连接。也可以点击 4处,手动添加.
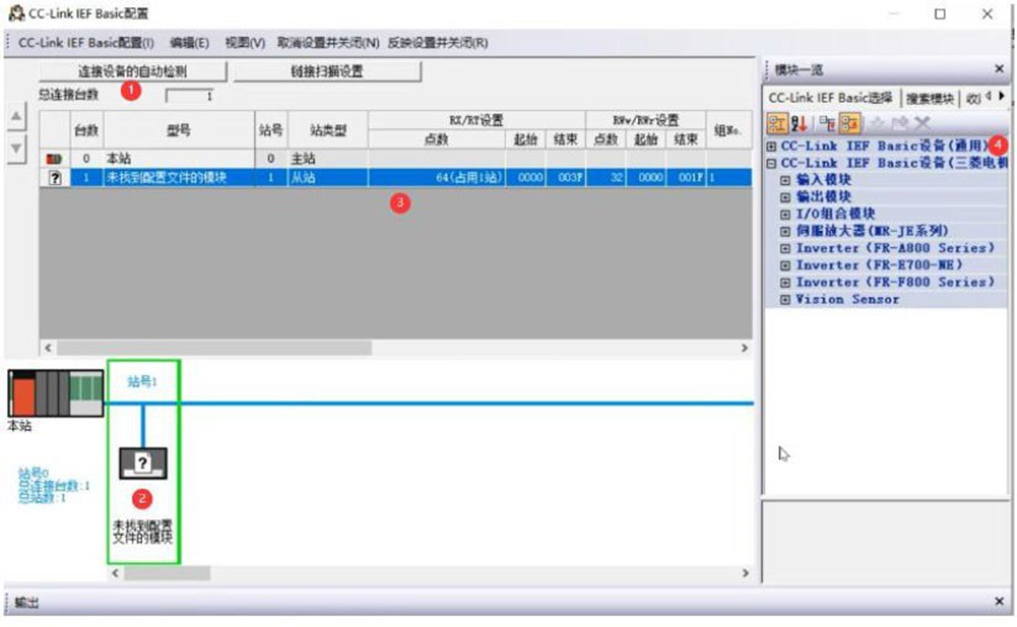
8,在上图的模块上点击右键,选择“在线”-“反映从站的通信设置”。在弹出的对换框中选择“是”。
9,关闭以上窗口。点击“设置结束”,不能点“取消”,否则设置不生效。
10,完成以上设置后,点击菜单“在线”-“PLC写入”,将组态下载到PLC中。下载完成后,PLC断电重启,才能生效。
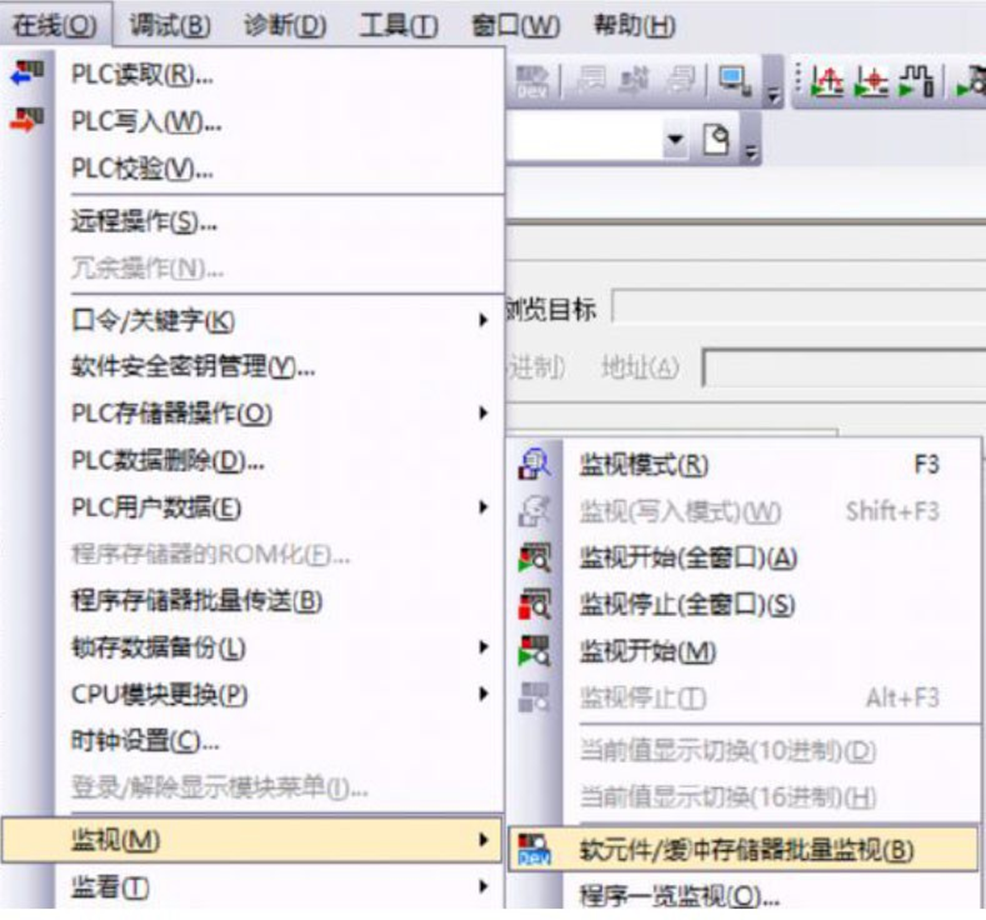
11,输入此前设置的软元件名,查看网关里的数据。

测试
12,如果有PLC等进行测试,无需再进行如下测试。
13,打开CCLinkMasterSimulator测试软件包。
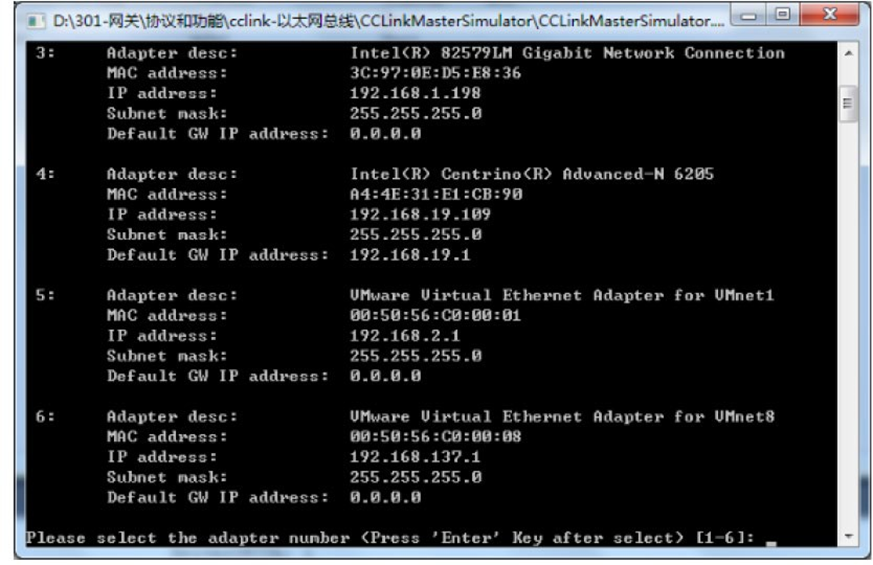
14,双击CCLinkMasterSimulator.exe。选择网关连接的网卡序号。
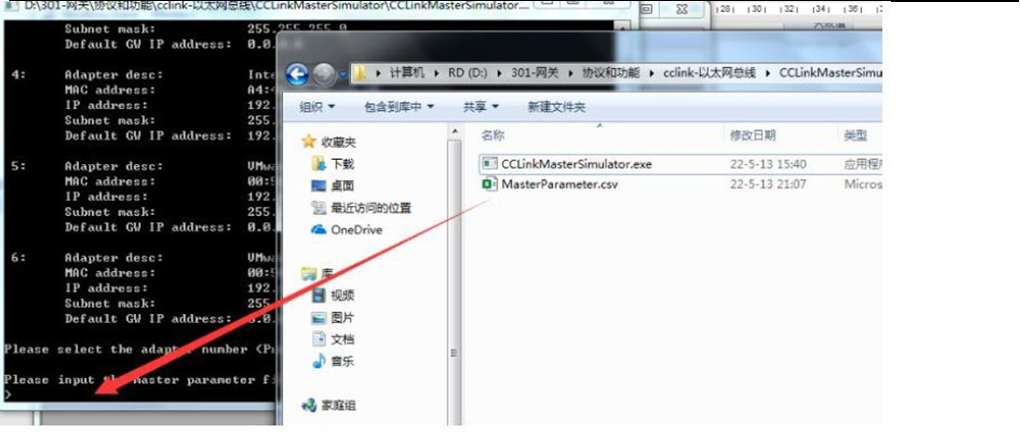
15,把MasterParameter.csv文件拖到箭头指向的地方,然后回车。
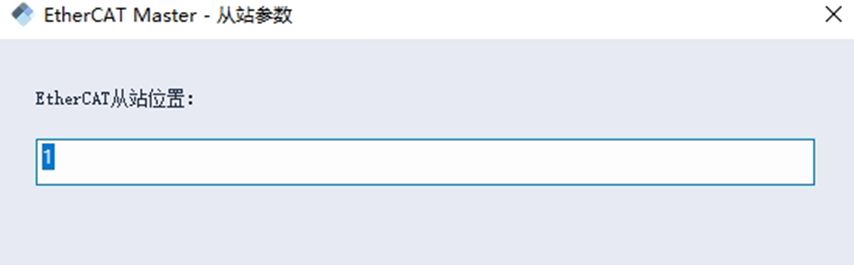
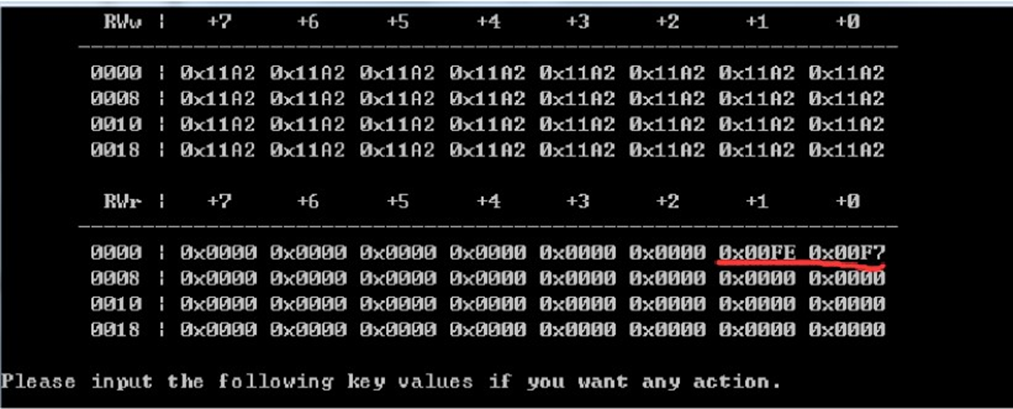
16,显示界面如下,输入5
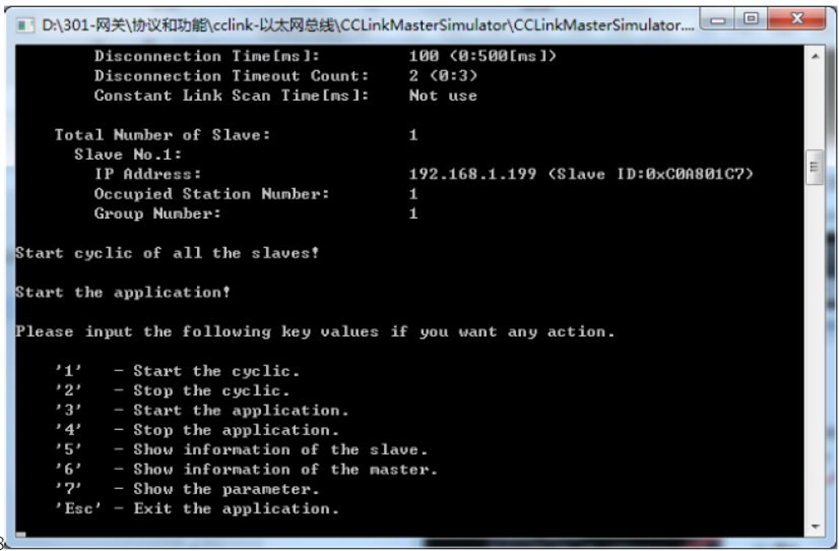
17,显示采集的数据
在我的职业生涯中,这样的挑战并不少见。凭借我在自动化控制领域的深厚专业知识以及丰富的实战经验,我相信本文所分享的信息和案例将会对面临类似问题的技术人员提供有价值的参考。通过对CC-Link IE与EtherCAT之间转换的深入探讨,希望能够启发更多的创新解决方案,推动行业的技术进步。
最终,在面临CC-Link IE三菱PLC转EtherCAT伺服的挑战时,我们要意识到这不仅是技术上的变革,更是产业升级的重要一环。只有不断适应和掌握最新的通信技术,才能在未来竞争日益激烈的市场中保持领先优势。
审核编辑 黄宇
- “神二十一”飞天在即!乘组地面训练精彩瞬间→,“神二十一”飞天在即!乘组地面训练精彩瞬间→
- 十年后沪指再度站上4000点 你赚钱了吗?
- 爱尔眼科可持续公益模式助力眼健康公平普惠,爱尔眼科可持续公益模式助力眼健康公平普惠
- 国家金融监督管理总局核准江朝阳招商银行股份有限公司董事
- 10月27日人民币对美元中间价报7.0881元 上调47个基点,10月27日人民币对美元中间价报7.0881元 上调47个基点
- 核聚变等新兴产业东风已至,天工国际(0826.HK)以材料创新激活新动能
- 政策显效 市场信心增强:税收数据稳步回升 经济向好态势不断稳固,政策显效 市场信心增强:税收数据稳步回升 经济向好态势不断稳固
- 内蒙古15名青少年用音乐架桥展北疆风情,内蒙古15名青少年用音乐架桥展北疆风情
- 新品解读:雷鸟鹤6 26款的“万象分区”为何是彩电市场的一记重拳
- 洽洽食品三季报解读:业绩保持平稳,新品新渠道成关键引擎,洽洽食品三季报解读:业绩保持平稳,新品新渠道成关键引擎
- 把握“924行情”科技主升浪 汇安基金近一年揽获4只“收益翻倍基”
- 《常州市优化营商环境条例》获批 以法治护航营商环境,《常州市优化营商环境条例》获批 以法治护航营商环境
- 上市公司动态 | 科大讯飞三季度净利增202%,宁德时代前三季度净利增36.20%,三一重工H股定价20.30-21.30港元
- 前三季度经济数据出炉 从关键数据看中国经济,前三季度经济数据出炉 从关键数据看中国经济
- 通研院全资产业转化平台通智科技战略入股品茗科技,以AI创新驱动产业升级
- 中国加入《世界遗产公约》40年 中西文明何以互鉴?,中国加入《世界遗产公约》40年 中西文明何以互鉴?