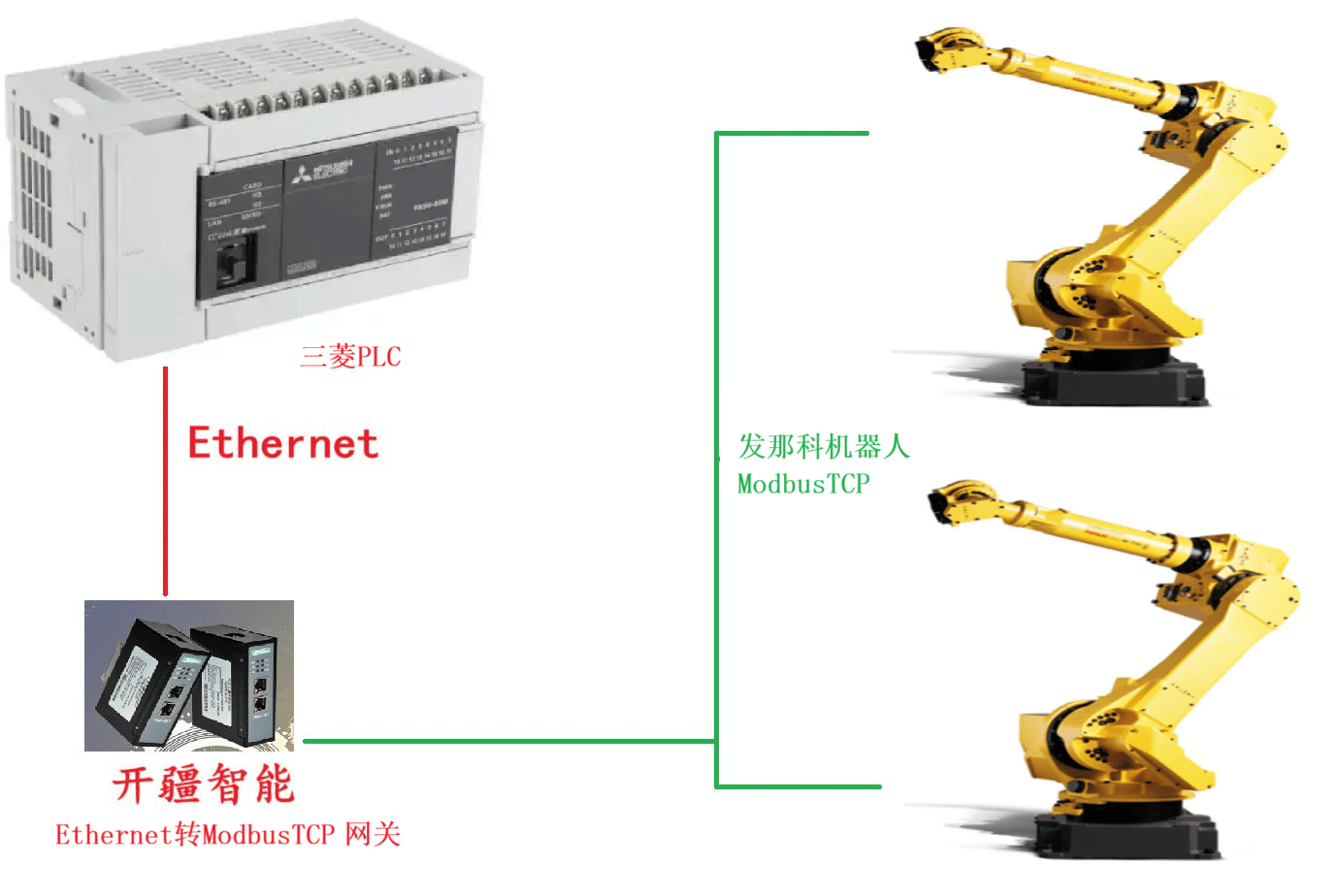
开疆智能Ethernet转ModbusTCP网关连接发那科机器人与三菱PLC配置案例
本案例是三菱FX5U PLC通过ethernet/IP转ModbusTCP网关对发那科机器人进行控制的配置案例。
PLC端主要配置
以太网端口设置
在通信测试中,PLC作为主站,在PLC设置中选择“以太网端口”非常关键,以确保通信测试的正常进行。
1、首先,在PLC设置中,选择“以太网端口”选项。
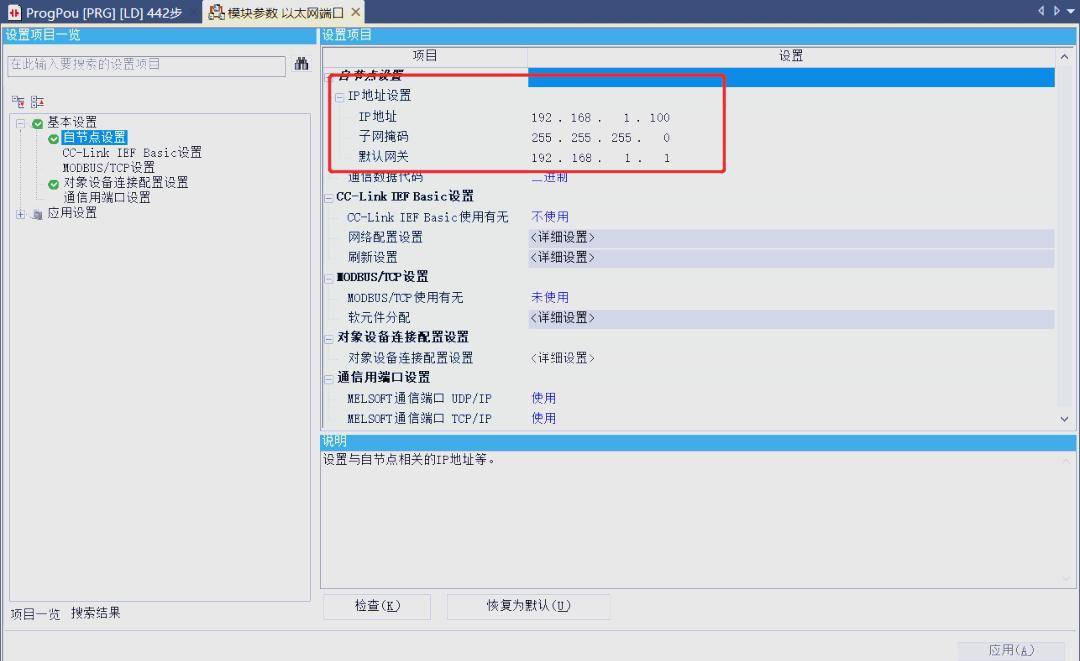
IP及网络配置
接下来,进行IP地址、子网掩码及默认网关的配置,以确保通信的准确性与稳定性。
2、接下来,在PLC设置中,配置主站的IP地址为192.168.1.100,子网掩码设置为255.255.2550,并指定默认网关为192.168.1.1。
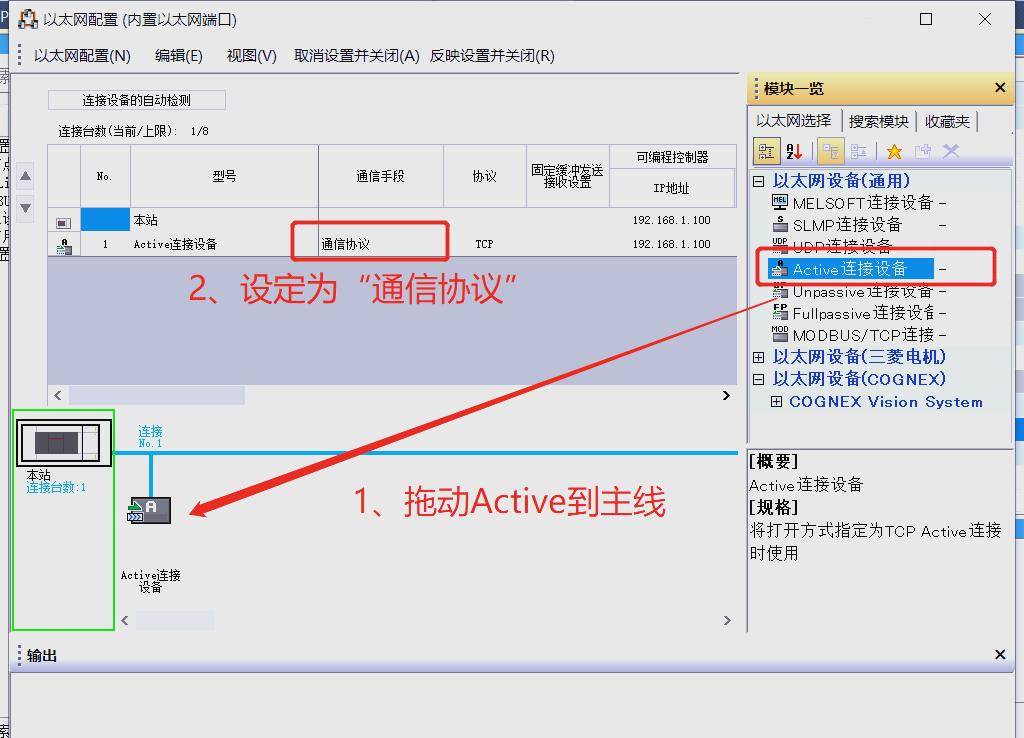
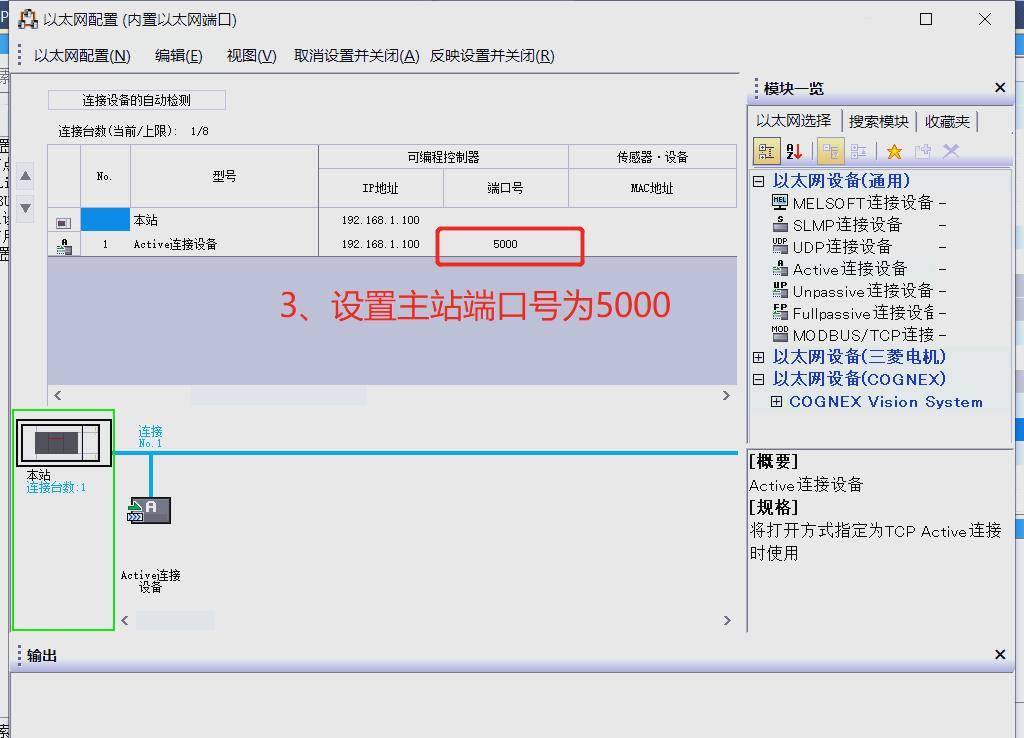
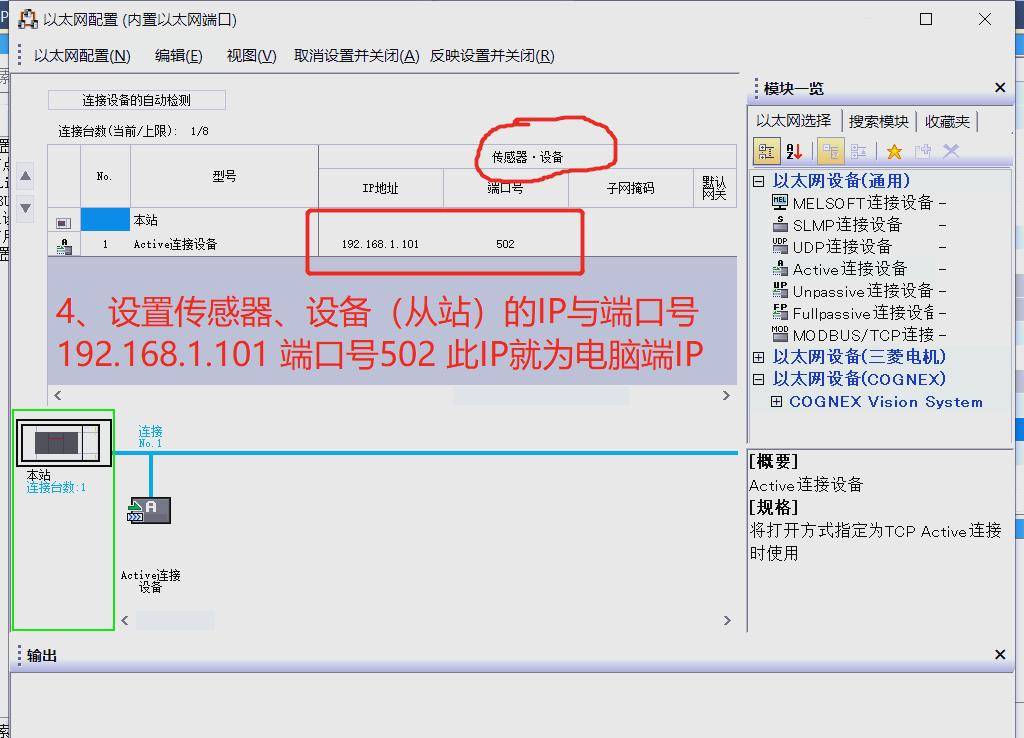
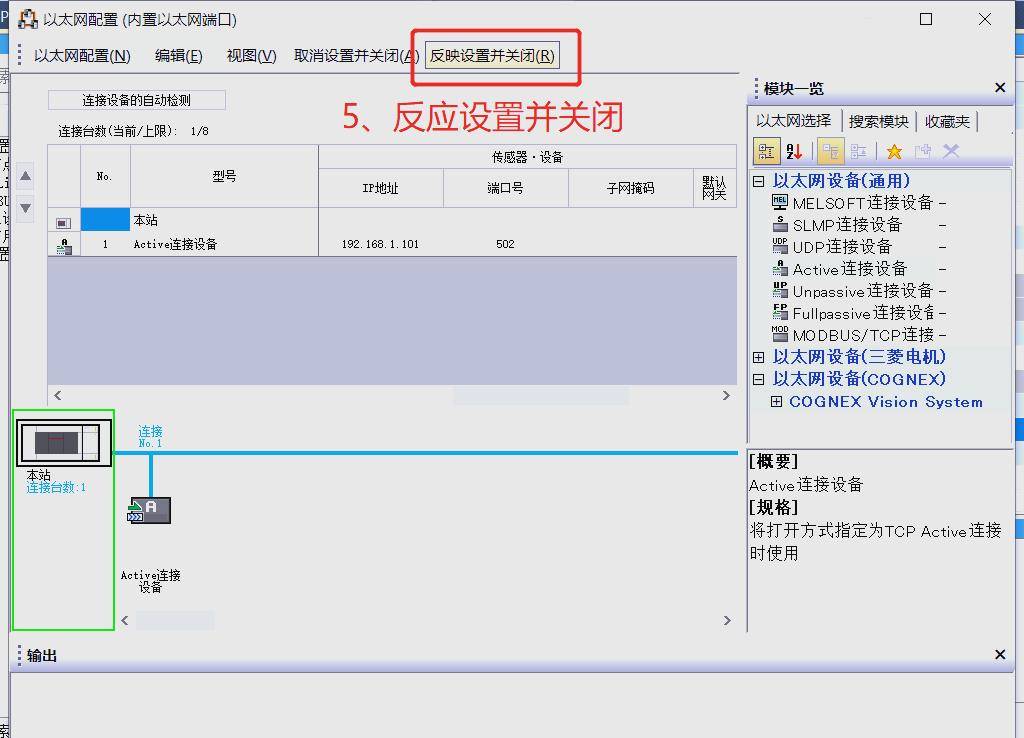
3、进行对象设备的连接配置。
4、在GX Works3软件中,找到并点击“工具”选项,然后选择“通信协议支持功能”进行设置,以确保三菱PLC能够正常支持通讯协议。
关键提示:在执行上述步骤时,请确保PLC与计算机的连接状态保持稳定,否则配置写入过程中可能会出现异常情况。
将组态下载进PLC
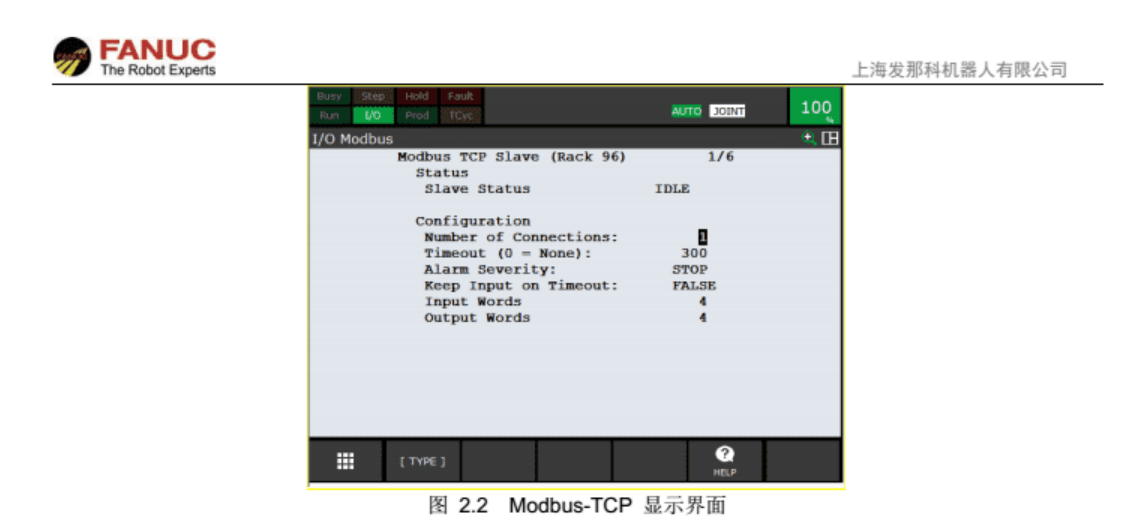
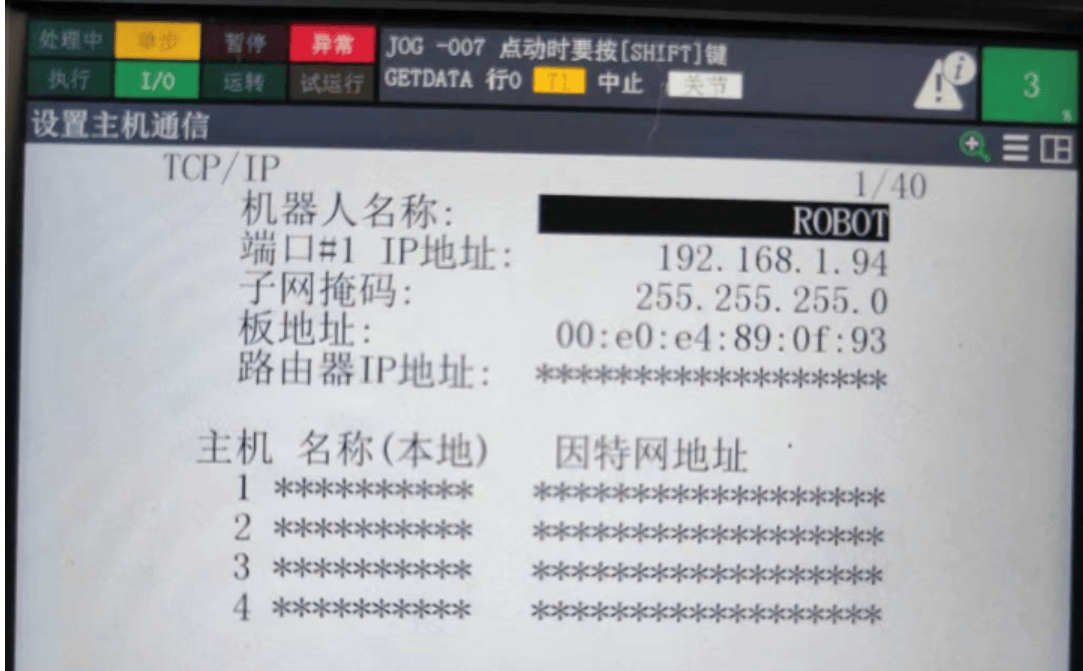
设置发那科机器人的TCP设置

设置TCP参数
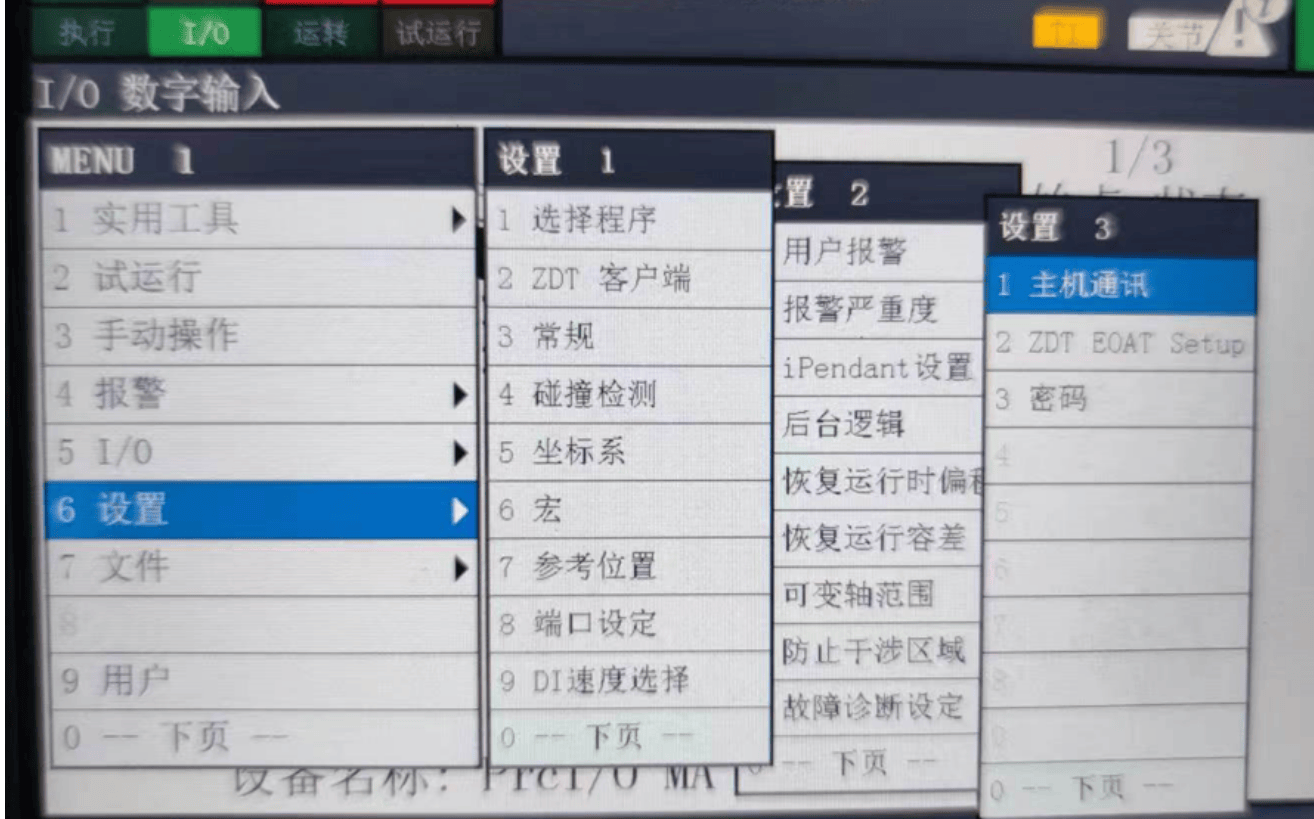
设置机器人的IP地址
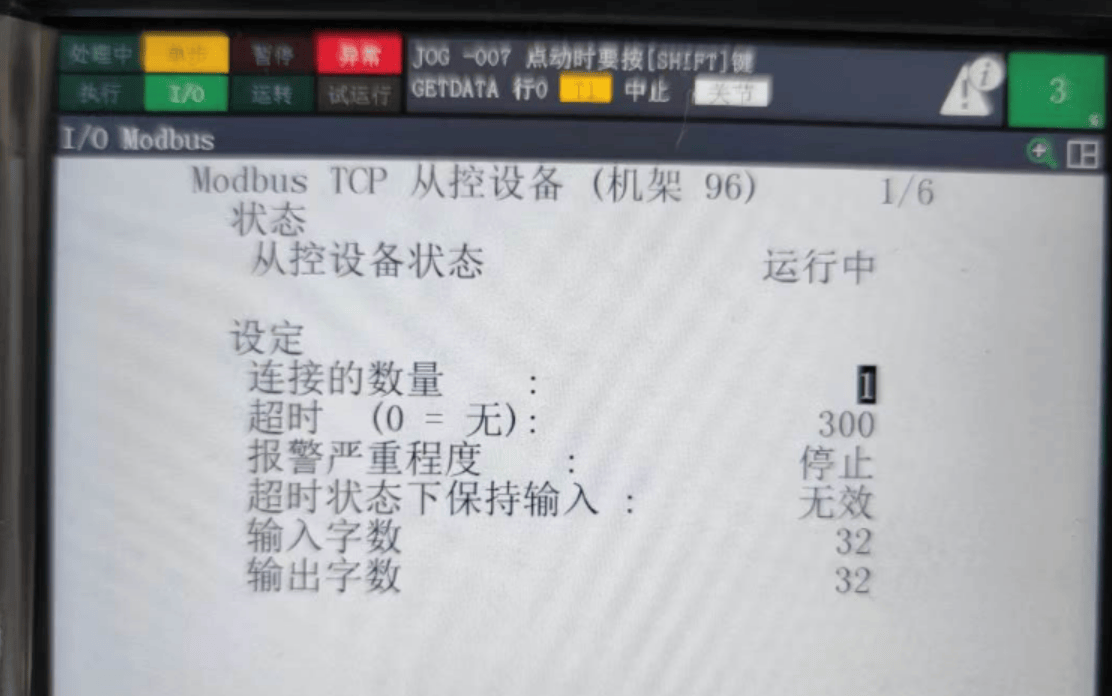
设置连接数与输入输出数据长度
分配好机器人的IO点数
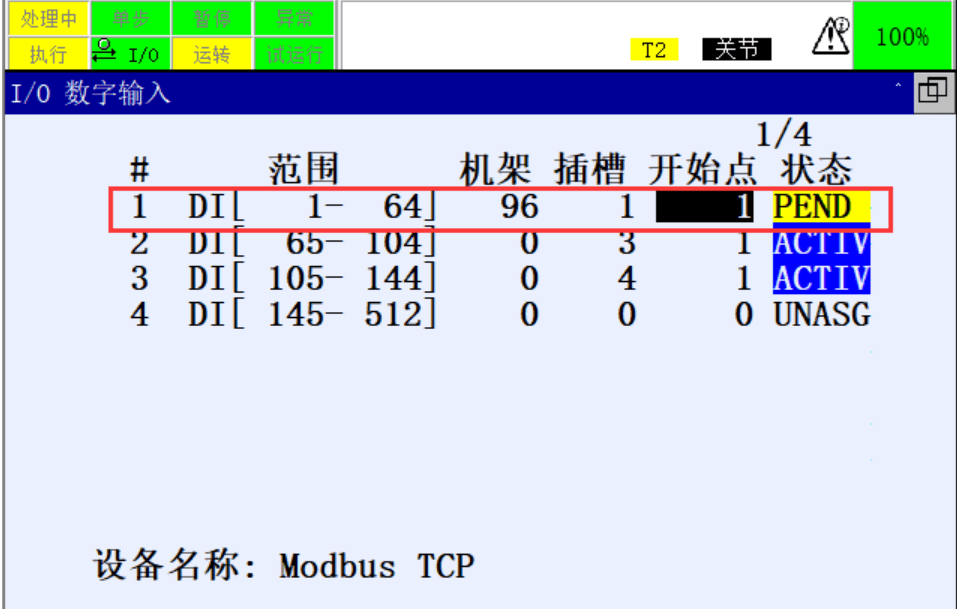
完成后将机器人重启使配置生效。
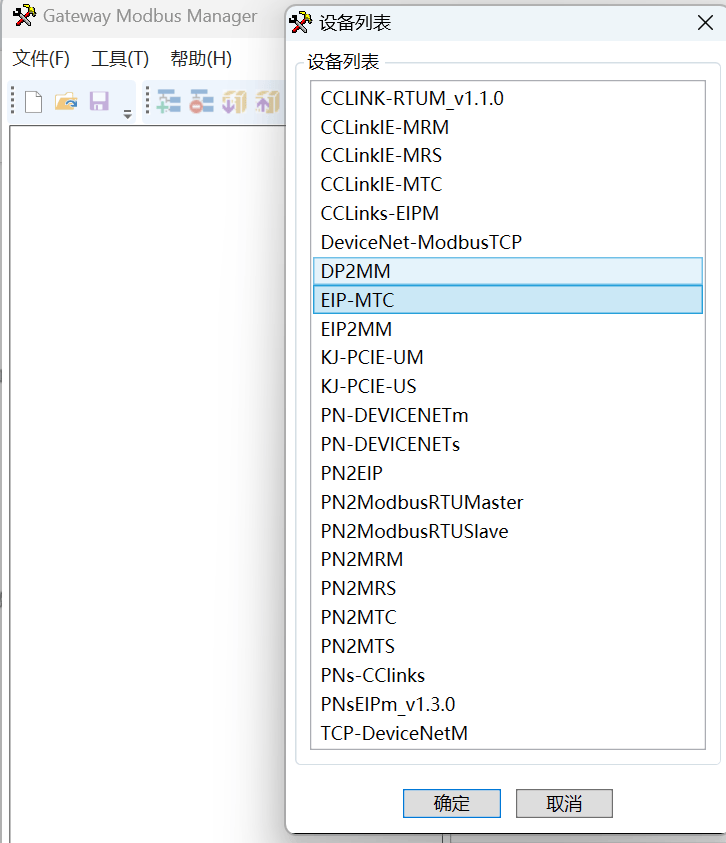
网关配置
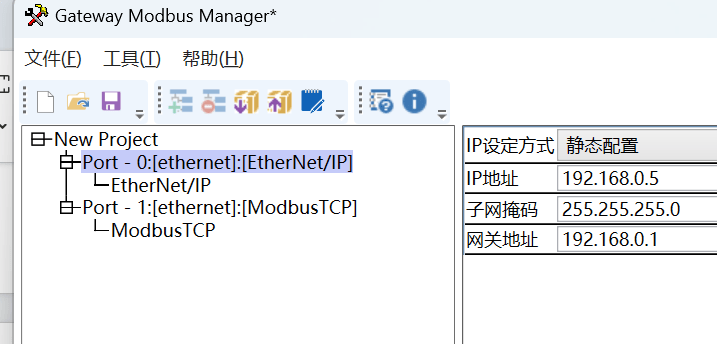
打开网关配置软件“Gateway Configuration Studio”并新建项目
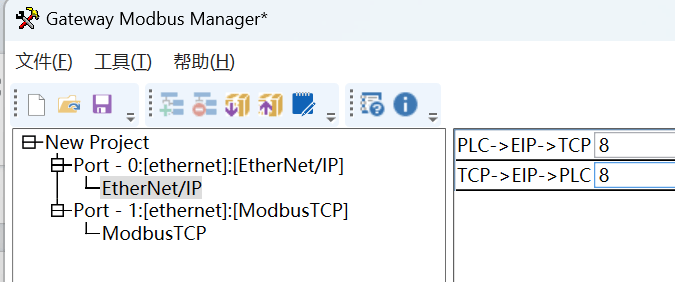
设置网关在Ethernet/IP的IP地址与输入输出数据长度。(IP地址与三菱PLC分配的地址保持一致)
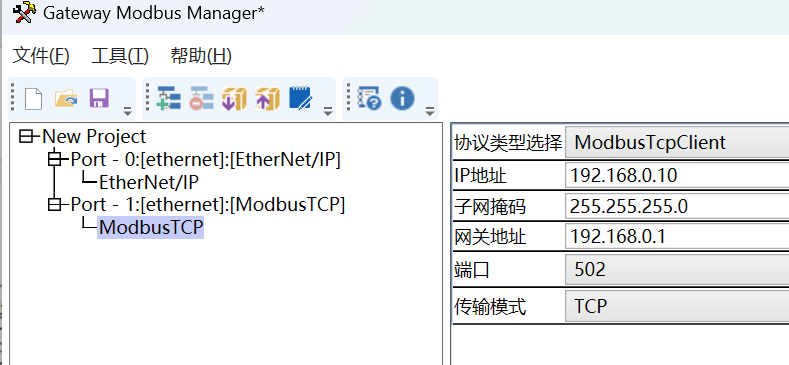
设置网关作为ModbusTCP客户端的IP地址,可与Ethernet不同网段。
添加从站(发那科机器人)的IP地址
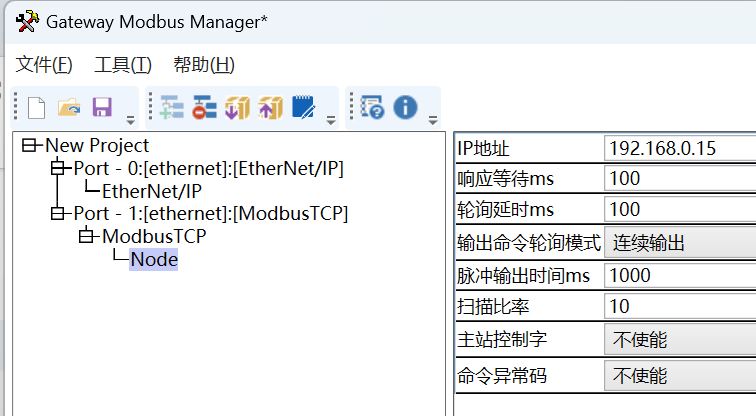
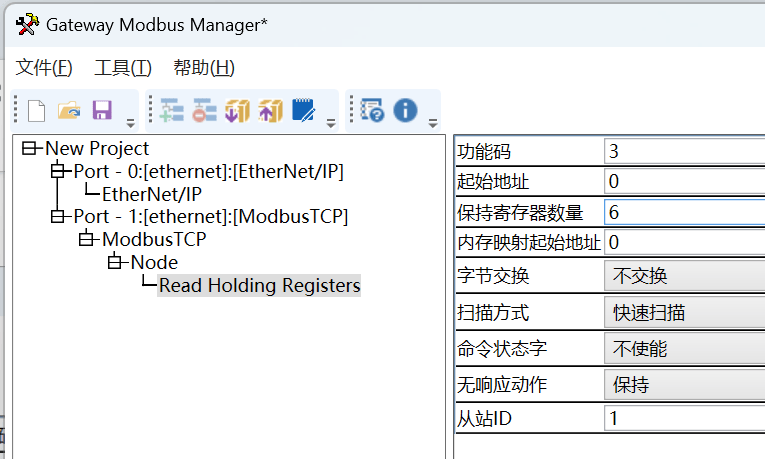
添加所需要功能码,可根据电能表手册进行设置。
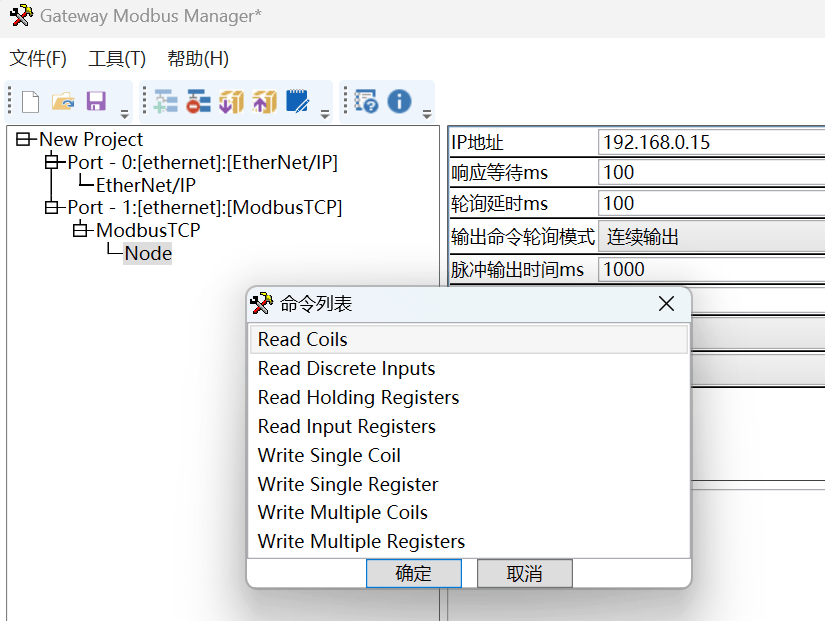
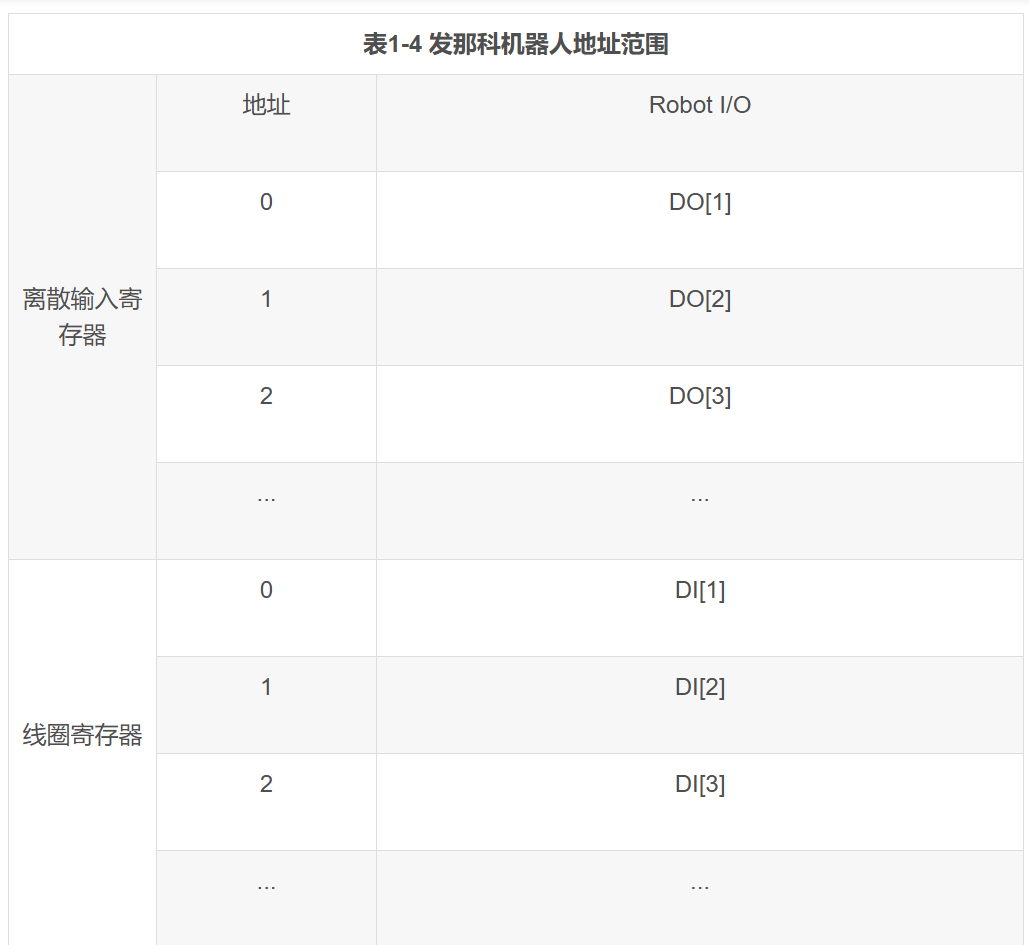
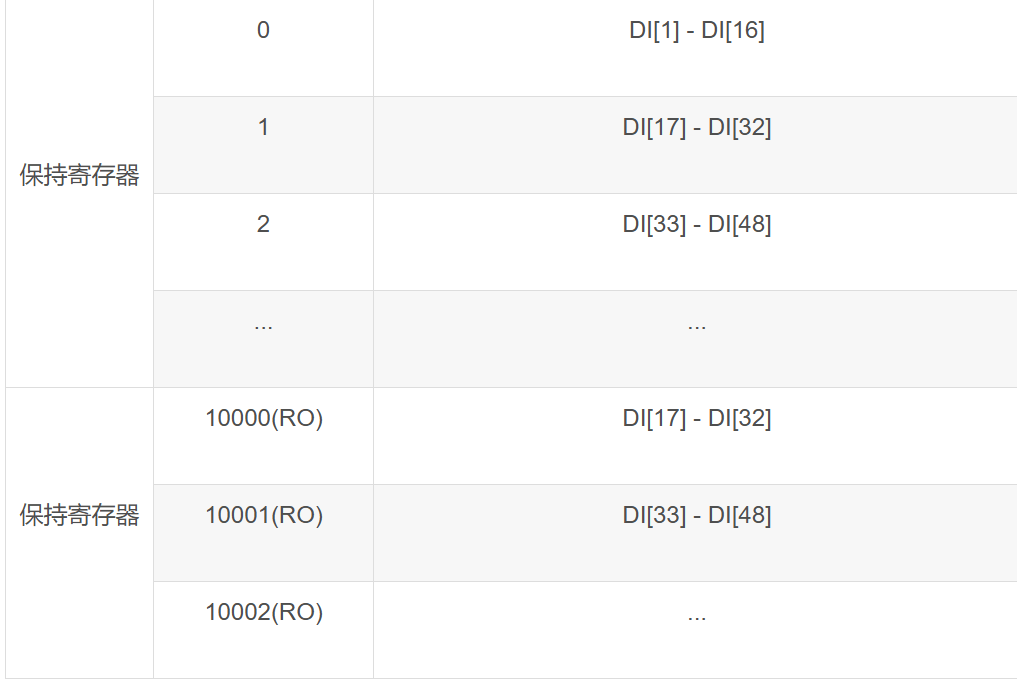
从手册得知机器人支持01/02/03功能码进行读取
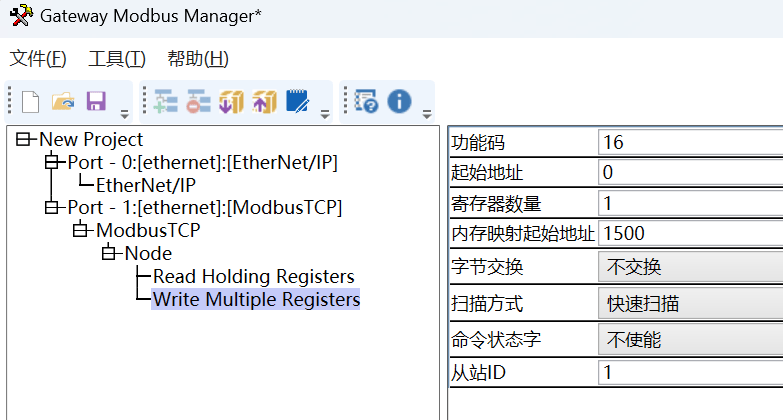
设置为03与16功能码,填写对应寄存器地址与寄存器数量。
如图所示,地址从0开始读取6个寄存器写一个寄存器
将配置下载进入网关即可正常进行通讯。
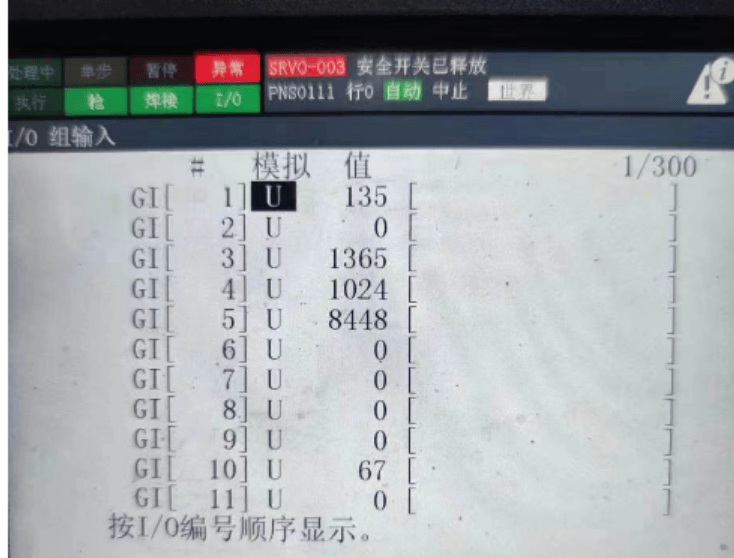
PLC给值后即可在机器人一侧读取到。
审核编辑 黄宇
- 顶级资本罕见联手押注光互连,光联芯科加速AI算力底层革命
- Yole:年末回顾全球MEMS器件中的创新设计
- 第二十届金扳手奖在京颁奖 多维助推汽车服务升级
- 沪游观察|影响独立游戏开发者的14个核心要点(下)
- 韧性2025|合资与豪华车企,还有戏吗?
- “十四五”期间,上海保护修缮不可移动革命文物56处
- 朱丽叶·比诺什在海南电影节:我把自己作为一个工具
- 今年前11个月浙江义乌海铁联运发运量达11.28万标箱,今年前11个月浙江义乌海铁联运发运量达11.28万标箱
- 王文涛会见德国外长瓦德富尔,双方就中德、中欧经贸关系交换意见
- 2025长春健博会开幕 多国企业寻合作拓市场,2025长春健博会开幕 多国企业寻合作拓市场
- 阿瑟·米勒:马克·吐温有一种稳定的潜在严肃性,鲜有其匹
- 从鄂尔多斯到沙特胡拜尔!44岁教师登顶世界健美之巅,从鄂尔多斯到沙特胡拜尔!44岁教师登顶世界健美之巅
- 天津机场口岸今年来出入境客流逾百万人次,天津机场口岸今年来出入境客流逾百万人次
- 上海建立志愿者实名制信息库,以数字化提升志愿服务效能
- 首列舒适型中老铁路国际旅游列车开启跨国之旅,首列舒适型中老铁路国际旅游列车开启跨国之旅
- 燃油车全系配置高阶智能,福特新蒙迪欧上市挑战B级车市场格局